+2 Daha
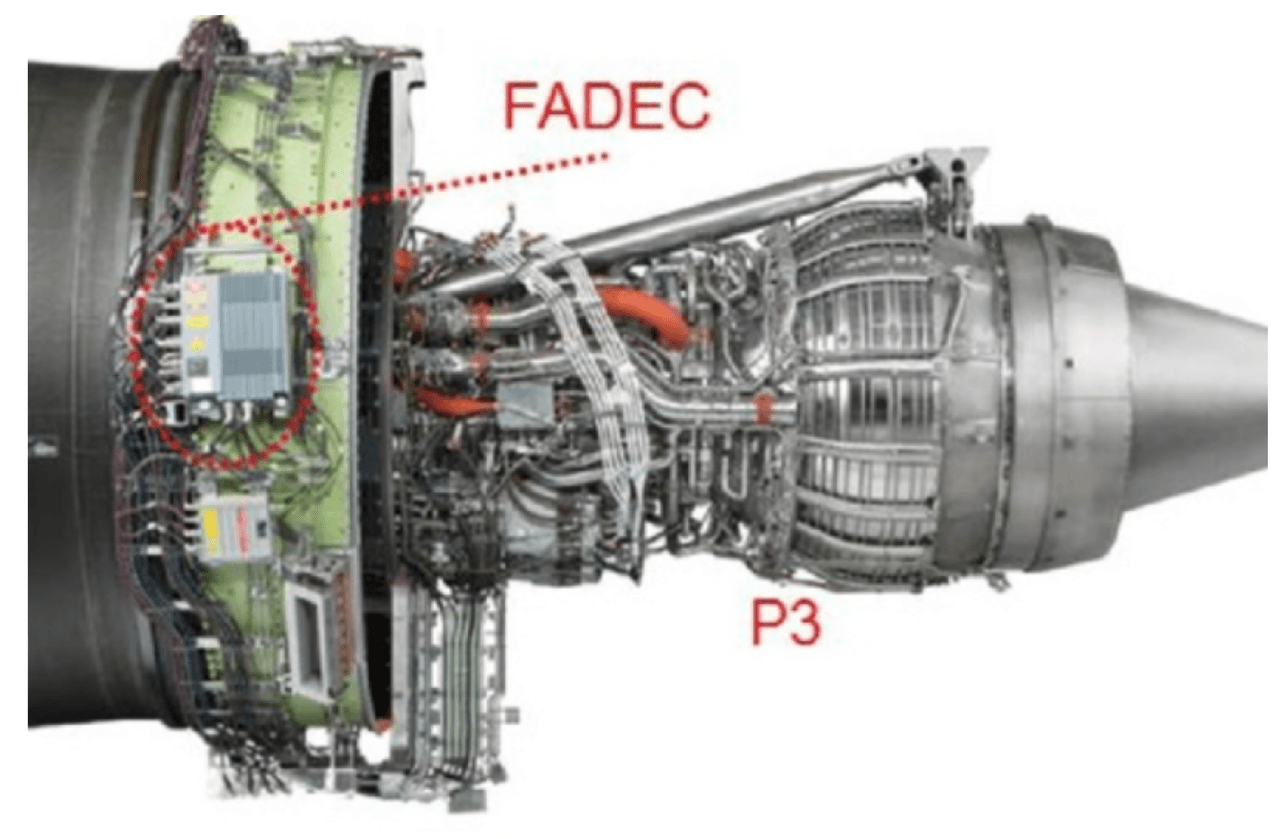
Tam Yetkili Dijital Motor Kontrolü (FADEC), modern hava araçlarında gaz türbinli motorların tam dijital kontrolünü sağlayan entegre bir elektronik sistemdir. FADEC, motorun tüm çalışma parametrelerini dijital olarak izleyen ve yöneten, pilot müdahalesi gerektirmeden optimal performansı hedefleyen, yazılım tabanlı bir kontrol sistemidir. Bu sistem, motorun çalışması için gerekli yakıt enjeksiyonu, kompresör ve türbin geometrisi, ateşleme gibi tüm süreçleri gerçek zamanlı olarak denetler ve düzenler. Temel amacı, güvenilirlik, emniyet, yakıt verimliliği ve bakım kolaylığı açısından klasik mekanik-hidrolik sistemlere kıyasla üstün bir motor kontrol altyapısı sunmaktır.
(Kredi: Michael Usrey)
Tam Yetkili Dijital Motor Kontrolü (FADEC) sistemlerinin doğuşu, havacılıkta motor kontrolü alanındaki analog ve hidromekanik kontrol sistemlerinin sınırlılıklarının aşılması ihtiyacından kaynaklanmıştır. 1970’li yılların sonlarında, uçak motorlarında daha hassas, hızlı ve entegre kontrol sistemlerine olan ihtiyaç giderek artarken, mikroişlemci teknolojilerindeki gelişmeler, elektronik kontrollü motor yönetim sistemlerinin önünü açmıştır.
İlk FADEC sistemleri, 1980’li yılların başlarında askeri havacılık uygulamalarında kullanılmaya başlanmıştır. Bu dönemde, elektronik denetimin yalnızca tamamlayıcı değil, tüm motor kontrolünü üstlenebilecek seviyeye gelmesiyle, klasik "supervisory" (gözetleyici) sistemlerden tam yetkili dijital kontrol sistemlerine geçilmiştir.
Bu ilk nesil FADEC'ler, gaz türbinli motorların kritik parametrelerini (örneğin rotor hızı, türbin sıcaklığı, yakıt akışı) gerçek zamanlı izleyerek, uçuş güvenliği ve yakıt verimliliğini artırmada önemli rol oynamıştır. Özellikle F/A-18 Hornet, Eurofighter Typhoon, Boeing 777 gibi hava araçlarında FADEC sistemlerinin kullanımı yaygınlaşmıştır.
FADEC sistemlerinin evriminde üç temel aşama tanımlanabilir:
Örneğin, son yıllarda Rolls-Royce tarafından geliştirilen Trent serisi motorlarda FADEC kontrol sistemleri, geleneksel PID algoritmalarına ek olarak model kestirimli kontrol yöntemlerini de kullanmaktadır. Ayrıca, General Aviation (genel havacılık) kategorisinde de FADEC’in benimsenmeye başlandığı görülmektedir. Lycoming (iE2 FADEC) ve Continental (PowerLink FADEC) gibi üreticiler, piston motorlarında FADEC uygulamaları geliştirmektedir.
1980’lerden itibaren dijital kontrol sistemlerinin havacılıkta kullanılabilirliği, yalnızca mühendislik değil aynı zamanda düzenleyici açıdan da bir dönüşüm gerektirmiştir. FADEC yazılımı, RTCA DO-178 ve DO-254 gibi sertifikasyon protokollerine uygun şekilde geliştirilmeye başlanmıştır. Bu standartlar, FADEC'in yazılım ve donanım bileşenlerinin uçuş güvenliği açısından kritik sınıflandırmalara tabi tutulmasını öngörür. Örneğin, DAL-A kategorisindeki FADEC yazılımı, en yüksek emniyet riskine sahip fonksiyonları içerdiği için titiz test ve doğrulama süreçlerinden geçmektedir.
Ayrıca, FADEC sistemlerinin gelişimi, fonksiyonel emniyet değerlendirme yöntemlerinin (FMEA, FTA, FHA) de daha ileri seviyeye taşınmasına neden olmuştur. Özellikle tek motorlu uçaklarda, FADEC arızalarının doğrudan uçuş emniyetini etkilediği göz önüne alındığında, arıza toleranslı mimariler yaygınlaşmıştır.
Yeni kuşak FADEC sistemleri yalnızca büyük yolcu uçakları ve savaş uçaklarında değil, aynı zamanda daha küçük ve hafif hava araçlarında da kullanılmaya başlanmıştır. Çalışmalar, örneğin 1500 N itki sınıfındaki küçük turbojet motorlar için modüler FADEC geliştirilmesi üzerine odaklanmıştır. Bu tür sistemler; planörler, insansız hava araçları, motorlu planörler ve yedek güç sistemleri gibi özel uygulamalarda kullanılmaktadır.
Bu bağlamda geliştirilen mini FADEC sistemleri, düşük ağırlık, düşük güç tüketimi, modüler yazılım-mekanik yapı, ve PID tabanlı kontrol algoritmaları ile optimize edilmektedir. Ayrıca bu sistemlerde veri toplama ve hata teşhis kabiliyetleri eğitim ve araştırma amaçlı da kullanılmaktadır.
FADEC sistemlerinin günümüzdeki gelişim yönü, aşağıdaki dört eksende yoğunlaşmaktadır:
Sonuç olarak, FADEC sistemleri yalnızca bir motor kontrol sistemi değil, bütüncül bir uçuş emniyeti ve verimlilik altyapısının dijital omurgası haline gelmiştir.
FADEC sistemi dört ana bileşenden oluşur:
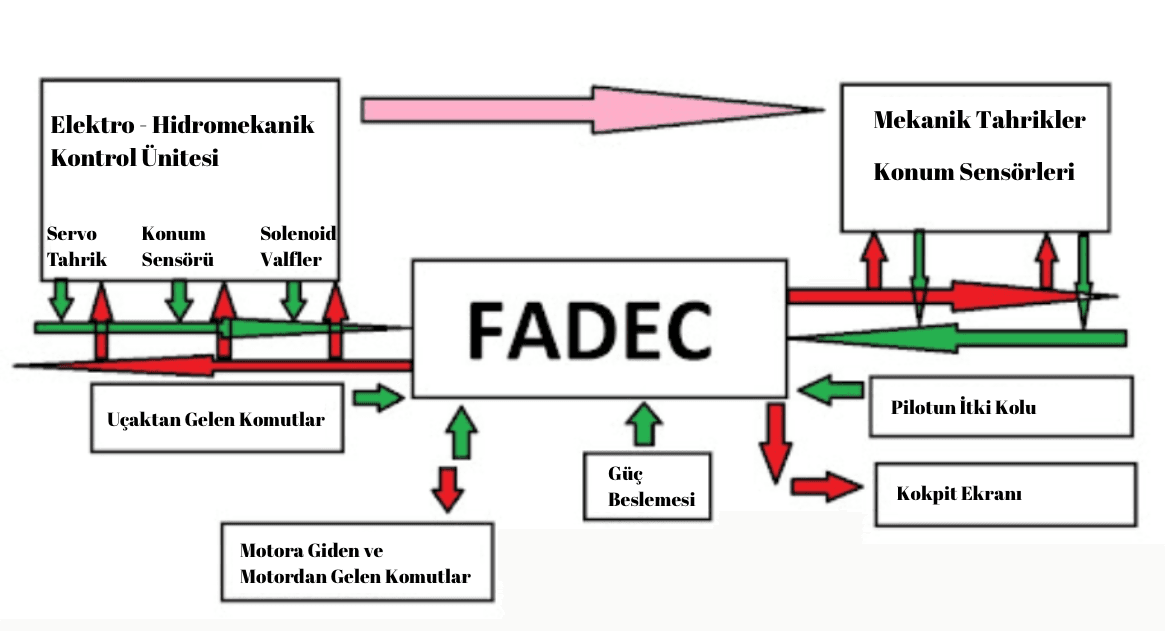
FADEC sistemi, bir hava aracı motorunun tüm işlevlerini gerçek zamanlı olarak yöneten, yazılım destekli, kapalı çevrim çalışan bir dijital motor kontrol sistemidir. FADEC sistemleri, yapısal olarak birbirine entegre çalışan birçok alt bileşenden oluşur. Bu alt bileşenlerin her biri, hem sistemin işlevselliği hem de uçuş emniyeti açısından hayati roller üstlenir.
Düzenleyen: Beyza Nur Türkü (Kredi: Alireza Behbahani)
FADEC sistemleri genel olarak aşağıdaki dört ana unsurdan oluşur:
Elektronik Kontrol Ünitesi, FADEC’in beyin kısmıdır. Uçak motorunun sensörlerinden alınan verileri işleyerek, yakıt enjeksiyonu, motor geometrisi (örneğin değişken nozullar, fan veya kompresör kanatçıkları), ateşleme zamanlaması ve koruma limitlerinin kontrolünü sağlar. ECU’nun donanım altyapısı şunlardan oluşur:
ECU içinde gömülü olarak çalışan yazılım, uçuş rejimine bağlı olarak motorun optimum performans noktasında çalışmasını sağlar. Modern ECU mimarileri, çift kanallı (redundant) yapıdadır; biri aktif çalışırken diğeri yedek durumdadır veya her iki kanal eş zamanlı çalışarak birbiriyle kontrol değerlerini karşılaştırır.
HMU, elektronik kontrol ünitesinden gelen sinyallere göre yakıt akışını doğrudan yöneten fiziksel bileşendir. Bu birim aşağıdaki alt parçalardan oluşur:
HMU’nun amacı, sistemin güvenli çalışma sınırlarını aşmadan motorun güç talebini karşılayacak şekilde yakıt akışını ayarlamaktır. Arıza senaryolarında HMU, fail-safe moduna geçerek motorun tehlikeli rejimlere girmesini engeller.
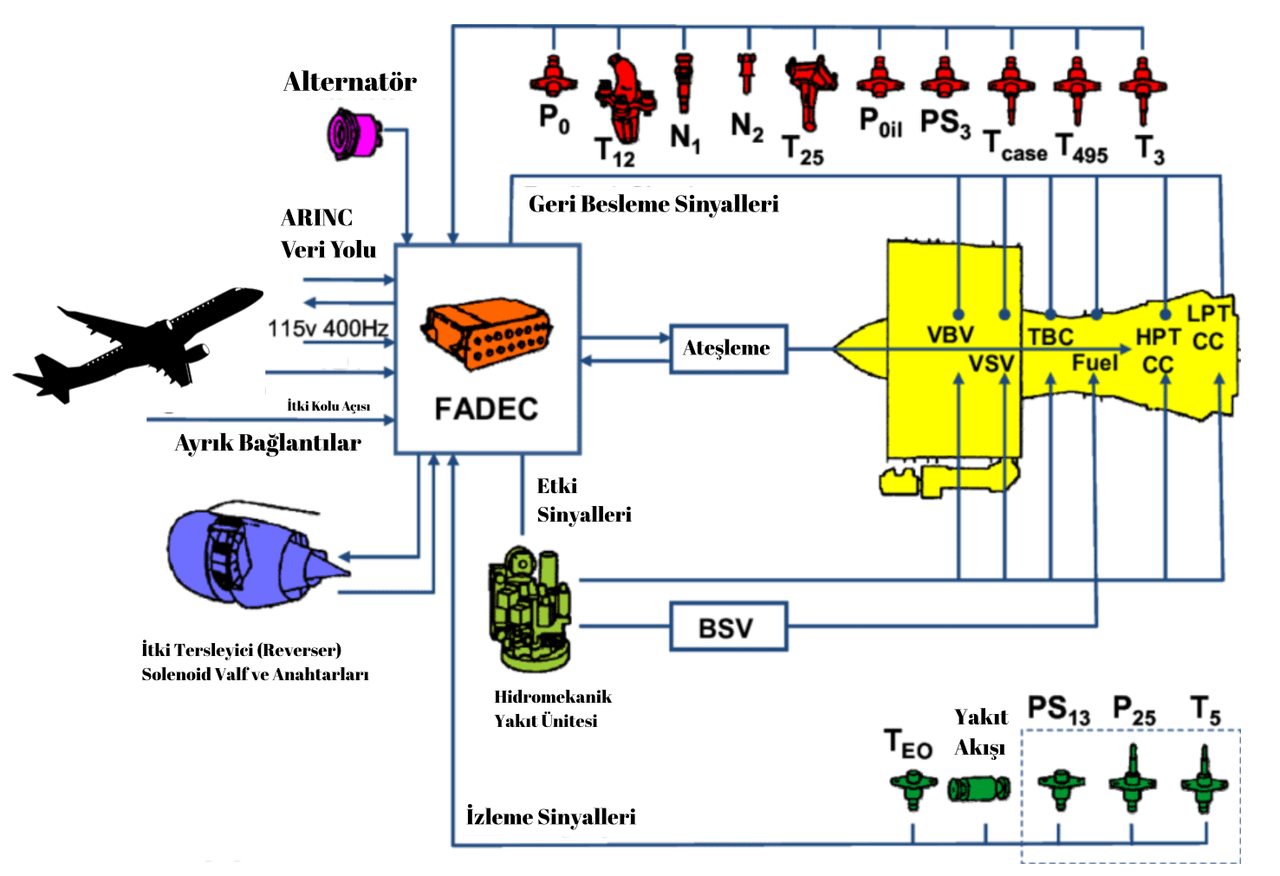
FADEC sistemi, motor ve hava aracı genelinde birçok sensörden gelen veriyle çalışır. Bu veriler, sistemin kapalı döngü kontrolünün temelini oluşturur. Tipik sensörler şunlardır:
Sensörlerden gelen analog sinyaller, A/D dönüştürücüler aracılığıyla sayısallaştırılır ve ECU tarafından işlenir. Veri kaybı, gürültü ve bozulmaya karşı koruma amacıyla sinyal filtreleme, arıza teşhis ve çoklu kaynak kontrol algoritmaları uygulanır.
FADEC sisteminin tüm bileşenleri arasında güvenilir veri ve güç iletimi sağlayan elektriksel bağlantılar şunlardır:
Yüksek elektromanyetik ortamda çalışan FADEC sistemleri, EMI testlerinden geçirilerek bu bileşenlerin dayanımı güvence altına alınır.
FADEC sistemleri, tam yetkili dijital kapalı döngü kontrol prensibine göre çalışır. Sistemin işleyişi şu adımlarla özetlenebilir:
Bu süreç milisaniyelik zaman dilimlerinde tekrarlanarak, FADEC’in motor davranışına ani tepkiler verebilmesini sağlar. Ayrıca FADEC sistemi uçuş boyunca:
Modern FADEC sistemlerinde ayrıca acil durum modları ve yedekleme katmanları (mekanik yedekleme veya çift ECU mimarisi) sayesinde sistem arızası durumunda uçuş güvenliği korunur.
Düzenleyen: Beyza Nur Türkü (Kredi: Aircraft Nerds)
FADEC sistemlerinin geliştirilmesi, havacılıkta uçuşa elverişlilik, güvenilirlik, çevresel uygunluk ve bakım kolaylığı gibi birçok kriteri aynı anda karşılayacak yüksek standartlara tabidir. Geliştirme süreci yalnızca donanım seçimi ve entegrasyonla sınırlı değildir; sistemin güvenli, deterministik ve optimize çalışan bir yazılım mimarisiyle desteklenmesi zorunludur. Bu nedenle FADEC yazılımı, modüler yapı, çok katmanlı programlama, görev önceliklendirme ve arıza toleranslı kontrol gibi özellikleri içeren gelişmiş mühendislik teknikleriyle tasarlanır.
FADEC sistemlerinin geliştirilmesinde aşağıdaki adımlar izlenir:
1- Senaryo ve Gereksinim Tanımlama
Sistem gereksinimleri, uçak motorunun tüm yaşam döngüsünü kapsayacak şekilde belirlenir. Senaryo analizleriyle (kalkış, uçuş, arıza, bakım, shut-down senaryoları) FADEC’in güçte kalması gereken durumlar, güç kesilmesi gereken anlar, soğuma süreleri gibi kritik kontrol noktaları analiz edilir.
2- Fonksiyonel Tanımlama
Her bir FADEC fonksiyonu (yakıt metrelendirme, motor hızı sınırlama, motor başlatma, motor durdurma, uçuş veri aktarımı) sistematik şekilde tanımlanır. Fonksiyonlara ait gereksinimler uçuş senaryolarına bağlanarak izlenebilirlik sağlanır.
3- Modüler Tasarım ve Fonksiyon Ayırımı
Yazılım tasarımında her kontrol işlevi (yakıt kontrolü, ateşleme, sıcaklık izleme) ayrı modüller hâlinde yapılandırılır. Bu sayede kod yeniden kullanılabilir, test edilebilir ve bakım kolaylığı sağlanır.
4- Yedeklilik ve Arıza Yönetimi Entegrasyonu
Sistem yedekli çalışacak şekilde tasarlanır (çift ECU, çift kanal veri yolları). Yazılım, birincil bileşende hata algılandığında yedek bileşeni devreye alacak şekilde senkronize edilmiştir.
5- Gerçek Zamanlı İşletim ve Zamanlayıcı Tabanlı Kontrol
FADEC yazılımı, gerçek zamanlı işletim sistemleri (RTOS) üzerinde çalışır. Zamanlayıcılar yardımıyla motor dinamiklerine uygun olarak milisaniye ölçeğinde görev planlaması yapılır.
FADEC sistemlerinin yazılım mimarisi genel olarak dört ana katmandan oluşur:
1. Sürücü (Driver) Katmanı
2. Adaptasyon Katmanı
3. Fonksiyonel Katman
4. Etkileşim / Arayüz Katmanı
Bu katmanlı yapı sayesinde hem fonksiyonel izolasyon hem de bakım kolaylığı sağlanır. Ayrıca bu yapı, sistemin uçuşa elverişlilik sertifikasyon sürecinde de izlenebilirlik ve güvenlik açısından avantaj sağlar.
FADEC sistemlerinde kullanılan kontrol algoritmaları, sistemin uçuş koşullarında güvenli ve verimli çalışmasını sağlamak amacıyla farklı düzeylerde kurgulanır. Bu algoritmalar genellikle aşağıdaki gruplarda sınıflandırılır:
1. Klasik Kontrol Algoritmaları (PI, PID)
2. Optimal ve Gelişmiş Kontrol (LQR, LQG/LTR)
3. Model Kestirimli Kontrol (MPC)
4. Yapay Zekâ Tabanlı Kontrol (ANFIS, NARX)
Geliştirilen yazılım, sistemin çeşitli test seviyelerinde doğrulanmalıdır. Bu amaçla aşağıdaki yöntemler kullanılır:
Yazılım geliştirme süreci, havacılık otoriteleri tarafından belirlenen DO-178C (software safety assurance) ve ARP 4754A (sistem geliştirme) standartlarına uygun biçimde yürütülür. Bu gereklilikler doğrultusunda:
FADEC sistemleri, uçak motorlarının hayati kontrol işlevlerini yürüttüğünden, geliştirilen donanım ve yazılımlar en yüksek seviyede güvenilirlik ve emniyet gereksinimlerini karşılamalıdır. Bu nedenle FADEC sistemlerinin tasarımı, üretimi, testi ve hizmete alınması süreçleri sıkı sertifikasyon protokolleri ve uluslararası standartlarla düzenlenmiştir.
Sertifikasyon süreci, sistemin hem fonksiyonel güvenlik (functional safety) hem de uçuşa elverişlilik (airworthiness) kriterlerini sağladığını belgelendirmeye yöneliktir. Süreç yalnızca yazılımın çalışıp çalışmadığını değil, hangi koşullarda, nasıl çalıştığını, hatalara karşı nasıl davrandığını ve sistematik güvenlik hedeflerini nasıl yerine getirdiğini de kapsar.
FADEC sistemlerinin sertifikasyonu, başta şu düzenleyici kurumlarca yürütülür:
Bu otoritelerce kabul edilen teknik standartlar, FADEC yazılım ve donanımlarının geliştirilme sürecinde uyulması gereken referans belgeleri olarak kullanılır.
FADEC sertifikasyonu sırasında dikkate alınan temel teknik standartlar şunlardır:
FADEC sertifikasyonu genel olarak şu aşamalardan oluşur:
1- Fonksiyonel Gereksinimlerin Tanımlanması:
Sistem, uçuş modlarına göre tanımlanır. FADEC’in hangi işlevleri gerçekleştireceği net biçimde belirlenir.
2- Güvenlik Değerlendirmesi (Safety Assessment):
FHA/FMEA/FTA yöntemleri ile FADEC arızalarının olası etkileri analiz edilir ve DAL seviyesi atanır.
3- Geliştirme Süreci ve İzlenebilirlik:
DO-178C/DO-254 kapsamında tüm yazılım/donanım bileşenleri için gereksinimlerden test sonuçlarına kadar uçtan uca izlenebilirlik sağlanır.
4- Doğrulama ve Test:
SIL (Software-in-the-loop), HIL (Hardware-in-the-loop), EMI/EMC testleri, yüksek sıcaklık, nem, titreşim ve gerilim koşullarında sistem testi gerçekleştirilir.
5- Bağımsız Denetim ve İnceleme:
FAA/EASA temsilcileri veya bağımsız doğrulayıcı kuruluşlar tarafından proje süreci, belgeler, test sonuçları ve hata kayıtları denetlenir.
6- Uçuş Testi ve Onay:
Geliştirilen FADEC sistemi, prototip uçak üzerinde gerçek uçuş koşullarında test edilir. Emniyet ve performans kriterlerini başarıyla karşılaması durumunda sertifikasyon tamamlanır.
Sertifikasyon süreci, FADEC sistemlerinin arızaya karşı dirençli (fault-tolerant) mimarilerle tasarlanmasını teşvik eder. Bu amaçla çift ECU (dual redundant control), TMR (Triple Modular Redundancy) mimariler, çevrimsel hata kontrolü (EDAC, CRC), kendini test eden yazılım süreçleri (BIST) gibi uygulamalar sistem tasarımına entegre edilmelidir.
Ayrıca, “perfect-from-start” varsayımı kaldırılarak, latent fault (gizli arızalar) ve incomplete repair (uçuşlar arası tamir edilmemiş arızalar) gibi durumların sisteme etkisi de modellenmekte ve sertifikasyon buna göre şekillenmektedir.
FADEC sistemleri, motorun her an optimum performansla ve güvenli şekilde çalışmasını sağlamak amacıyla gelişmiş kontrol algoritmalarıyla donatılmıştır. Geleneksel PI/PID denetleyicilerin sınırları ve motor performansının çok değişkenli, doğrusal olmayan doğası, FADEC sistemlerinde daha modern, uyarlanabilir ve kestirimci kontrol yaklaşımlarının kullanılmasını zorunlu kılmıştır.
Modern kontrol yöntemleri, yalnızca motor performansını dengelemekle kalmaz; aynı zamanda emisyonların azaltılması, yakıt tüketiminin optimize edilmesi, arıza toleransı sağlanması ve uçuş koşullarına hızlı adaptasyongibi birçok hedefi de gerçekleştirebilmektedir.
Geleneksel PID (Proportional-Integral-Derivative) denetleyiciler, FADEC sistemlerinde özellikle sabit rejimlerde ve düşük dinamik gereksinimlerde tercih edilmektedir. Örneğin küçük turbojet motorlarda PID denetimi yaygın biçimde kullanılır. Bu yöntemin avantajları arasında uygulama basitliği ve düşük hesaplama maliyeti bulunur.
Ancak:
Bu sınırlamalar nedeniyle daha gelişmiş kontrol algoritmaları geliştirilmiştir.
LQR, motor sisteminin kararlılığını sağlarken kontrol eforunu da minimize etmeyi amaçlayan bir kuadratik maliyet fonksiyonu ile çalışır. FADEC’te LQR kullanımı, özellikle doğrusal modellerin hakim olduğu rejimlerde etkilidir.
LQG, LQR'nin gelişmiş bir formudur ve rastgele gürültü (white noise) ve ölçüm hataları içeren sistemler için uygundur. LTR yöntemiyle sistemin hata toleransı artırılarak performans kaybı minimize edilir. FADEC yazılımına entegre edildiğinde, motor dinamiğindeki belirsizlikleri daha iyi yönetebilir.
Model Predictive Control (MPC), motorun gelecekteki davranışlarını önceden tahmin ederek buna göre karar verir. Her kontrol döngüsünde, optimizasyon algoritması belirli bir zaman ufkunda sistemin tepkisini simüle eder ve kısıtlı optimizasyon uygular.
Uygulama Özellikleri:
Modern FADEC araştırmalarında öğrenen algoritmalar, motorun hem lineer hem de doğrusal olmayan davranışlarını tahmin ve kontrol etmekte yaygınlaşmıştır. Bu yöntemler, özellikle karmaşık, çok değişkenli, çoklu hedef içeren kontrol problemlerinde klasik yöntemlerin yerini almaya başlamıştır.
Bu modeller, emisyon azaltımı, motor güvenliği, yakıt verimliliği gibi çoklu hedeflerin aynı anda optimize edilmesini sağlar.
Modern kontrol algoritmaları, sadece tek bir performans ölçütüne değil; birden fazla hedefe (güç, emisyon, tepki süresi, yakıt sarfiyatı) göre karar alabilecek şekilde tasarlanır. Bu bağlamda Genetik Algoritmalar (GA) gibi evrimsel optimizasyon teknikleri de FADEC kontrol stratejilerinde kullanılmaktadır.
Optimizasyon Kriterleri:
Modern FADEC sistemleri, sensör arızaları, aktüatör sapmaları veya çevresel belirsizlikler karşısında sistemi kararlı ve güvenli bir şekilde çalıştırabilecek arıza toleranslı kontrol yapılarıyla desteklenmektedir.
Bu yaklaşımlar, özellikle tek motorlu platformlar gibi arızaya karşı daha hassas ortamlarda kritik önem taşır.
FADEC sistemlerinin uçuşta güvenle kullanılabilmesi için geliştirme sürecinde yalnızca yazılım ve donanım tasarımı değil; bu sistemlerin kapsamlı bir şekilde doğrulanması, geçerlenmesi ve test edilmesi de kritik önemdedir. Simülasyon ve yer test ortamları, FADEC’in uçuş öncesi senaryolarda nasıl performans göstereceğinin sistematik olarak değerlendirilmesini sağlar.
Bu test ortamları sayesinde hem normal hem de anormal çalışma koşulları güvenli ve kontrollü bir şekilde yeniden oluşturulabilir. Böylece FADEC sisteminin algoritmik doğruluğu, sistem güvenliği, hata toleransı ve çevresel uyumluluğu önceden test edilerek uçuşa hazır hale getirilir.
Simülasyon ortamları, FADEC geliştirme sürecinde üç temel amaca hizmet eder:
Simülasyon ortamları; motorun dinamik davranışını, sensörlerin geri beslemelerini ve kontrol girdilerini zamana bağlı olarak taklit eden matematiksel motor modelleri kullanır. Bu ortamlar sayesinde uçuş emniyetini tehdit eden durumlar da önceden tespit edilebilir.
FADEC yazılımı için özel olarak geliştirilmiş Aviyonik Simülasyon Test Sistemleri (AVIONSTS), gerçek motorun yerine geçen yazılımsal motor modelleri ile kontrol yazılımını çalıştırır. Bu sistemler çok katmanlı yazılım mimarisi kullanır ve şu bileşenlerden oluşur:
Bu yapılar, FADEC yazılımının uçuş öncesi davranışını yüksek doğrulukla simüle ederken, aynı zamanda gerçek zamanlı hata senaryolarını da değerlendirme olanağı sunar.
FADEC sistemleri, yazılım testlerinin ötesinde gerçek donanım bileşenleriyle yer test sistemlerinde de değerlendirilmelidir. Yer test ortamı, FADEC’in uçak motoruyla bağlantı kurmadan, motorun dinamiklerini elektronik olarak taklit eden ortamda çalıştırılmasını içerir.
Tipik yer test ortamı aşağıdaki bileşenleri içerir:
Uçaklar, elektromanyetik açıdan gürültülü ortamlarda çalıştığından FADEC sistemleri EMI (Electromagnetic Interference) ve EMC (Electromagnetic Compatibility) testlerine tabi tutulmalıdır.
Test Koşulları:
Test esnasında FADEC kapalı döngüde çalıştırılır ve motorun performans çıktılarında anomali olup olmadığı kontrol edilir.
Yer test sistemleri, aynı zamanda FADEC sistemine farklı türde hataların kasıtlı olarak enjekte edilmesini ve sistemin bu hatalara karşı tepkisinin izlenmesini sağlar:
Bu tür senaryoların test edilmesi, FADEC sisteminin fail-safe, fail-operational veya reconfiguration gibi güvenlik modlarının başarıyla çalışıp çalışmadığını doğrular.
FADEC sistemi, tüm yazılım ve donanım testlerini geçtikten sonra, motor prototipi üzerinde statik test standında denenir. Ardından uçak platformuna entegre edilerek uçuş testlerine geçilir. Bu süreç şu adımları içerir:
Bu testlerden önceki tüm simülasyon ve yer testleri, uçuş testi sırasında FADEC sisteminde hata meydana gelmesini minimize etmeyi amaçlar.
FADEC sistemleri, motor kontrolünde görev alan yüksek hassasiyetli elektronik alt sistemlerden oluşur. Bu sistemler, hava araçlarının karmaşık ve yüksek yoğunluklu elektromanyetik ortamlarda çalışması nedeniyle, elektromanyetik girişimlere (EMI) karşı özel olarak test edilmek zorundadır. Bu testlerin amacı, FADEC sisteminin elektromanyetik ortamlarda güvenli, hatasız ve öngörülebilir şekilde çalışmaya devam ettiğini doğrulamaktır.
Elektromanyetik uyumluluk (EMC - Electromagnetic Compatibility) ve radyasyon dayanıklılığı testleri, FADEC sistemlerinin hem yayın yapan (emitting) hem de etkilenen (susceptible) taraflarını değerlendiren kapsamlı test prosedürleridir.
Elektromanyetik testler, FADEC’in aşağıdaki risk senaryolarına karşı dayanıklılığını sınar:
Bu koşullar altında FADEC’in işlevlerinde sapma, kesinti, resetleme ya da hatalı yakıt kontrol komutu üretmesi gibi durumlar yaşanabilir. Bu nedenle elektromanyetik testler, FADEC’in uçuş emniyeti açısından kritik bir bileşen olarak değerlendirilmesini zorunlu kılar.
Geleneksel EMI/EMC testleri, anekoik odalarda (EM dalgalarını yutan, yankısız ortamlar) yapılmaktayken, FADEC gibi karmaşık kapalı döngü sistemlerin testinde reverberasyon odaları (çınlama odaları) tercih edilmeye başlanmıştır.
Reverberasyon Odalarının Avantajları:
Örnek bir test çalışmasında, FADEC sistemi >1000 V/m düzeyinde elektromanyetik alan şiddetine maruz bırakılmış ve sistemin analog/dijital çıkışlarındaki sapmalar izlenmiştir. Bu tür testlerde +/- 1-2% güç sapması, işlevsel bozulma olarak değerlendirilmiştir.
FADEC sistemleri için uygulanan elektromanyetik testler, hem sivil havacılık hem de askeri havacılık standartlarına dayanır:
Sivil Standartlar:
Askeri Standartlar:
Test Senaryoları:
Elektromanyetik testlerde kullanılan tipik donanım ve kurulum bileşenleri şunlardır:
Bu donanım sayesinde sistemin çalışma noktası (örneğin throttle pozisyonu, yakıt akışı) izlenerek tolerans dışı sapmaolup olmadığı tespit edilir.
FAA Advisory Circular 33-28 tarafından önerilen test geçerlilik kriteri:
"EME maruziyeti sırasında sistemin fonksiyonel özelliklerinde herhangi bir etki gözlemlenmeyecektir."
Bu kriter, aşağıdaki şekilde pratikleştirilir:
EMI/EMC testlerinden başarılı sonuç alabilmek için FADEC sistem tasarımında aşağıdaki önlemler uygulanır:
Bu tür tasarımsal önlemler sayesinde FADEC sistemleri hem test ortamında hem de gerçek uçuş koşullarında güvenilir şekilde çalışabilir.
FADEC sistemlerinde meydana gelebilecek arızalar genel olarak üç kategoride incelenir:
Gizli arızalar özellikle kritik olarak değerlendirilir çünkü uçuşa başlamadan önce yapılan sistem testlerinde algılanamayabilirler. Bu durum, "perfect from start" varsayımının yetersiz kaldığı fazlı görev modellemelerinde açıkça gözlemlenmiştir.
FADEC sistemlerinde güvenilirlik analizi kapsamında en yaygın kullanılan yöntemlerden bazıları şunlardır:
1. FMEA (Failure Modes and Effects Analysis)
2. FHA (Functional Hazard Assessment)
3. FTA (Fault Tree Analysis)
Bu analizler, FADEC bileşenlerine hangi Design Assurance Level (DAL) değerinin atanacağını belirlemede de kullanılır. Örneğin, motor durmasına neden olabilecek bir arıza DAL A ile değerlendirilir ve en sıkı yazılım doğrulama süreçlerine tabidir.
FADEC sistemlerinin zamana bağlı arıza davranışlarını incelemek için Markov modelleri yaygın biçimde kullanılır. Bu yaklaşım özellikle tekrar onarılamayan, yedekli çalışan veya fazlı görevlerde kullanılan sistemlerde etkilidir.
Markov Modelleme ile:
Örneğin, RM12 motoru (JAS 39 Gripen) için yapılan çalışmalarda iki farklı FADEC mimarisi analiz edilmiştir:
Her iki mimaride de latency, coverage ve yeniden yapılandırma süreleri modele dahil edilmiş, sonuçta TMR mimarisinin daha düşük başarısızlık olasılığı sunduğu görülmüştür.
Bir diğer modern yaklaşım olan state-part yöntemi, FADEC sisteminin alt bileşenlerini fonksiyonlarına göre sınıflandırarak analiz eder. Bu yöntemde her bileşen şu kategorilerden birine atanır:
Bu yöntem, klasik seri-paralel sistem analizlerinden farklı olarak, fonksiyonel bağımlılığı esas alır. Sonuç olarak sistem güvenilirliği bu parça gruplarının ağırlıklı toplamına göre hesaplanır.
Güvenilirliği artırmak için FADEC sistemlerinde yaygın olarak şu önlemler alınır:
Bu yapıların amacı yalnızca arızayı tespit etmek değil, aynı zamanda uçuşun kesintisiz devamını da sağlamaktır. Özellikle TMR yapı, bir kanal hata verirse sistem kalan 2 kanalın oyuyla karara devam eder ve arızalı kanal sistem dışı bırakılır.
FADEC sistemleri, başlangıçta büyük ticari yolcu uçakları ve askeri jet motorları için geliştirilmiş yüksek teknolojili motor kontrol çözümleriydi. Ancak zamanla donanım miniatürizasyonu, yazılım maliyetlerindeki azalma ve artırılmış güvenilirlik sayesinde FADEC sistemlerinin genel havacılık (General Aviation, GA) platformlarına da yayılmaya başladığı gözlemlenmektedir.
Genel havacılık kapsamına giren sabit kanatlı piston motorlu uçaklar, küçük turbojet motorlarıyla çalışan eğitim araçları, insansız hava araçları (İHA/UAV), motorlu planörler, çok hafif hava araçları (ULM) ve sivil havacılık eğitim sistemleri, artık FADEC entegrasyonuna aday hale gelmiştir.
Aşağıdaki teknik ve operasyonel avantajlar, FADEC’in genel havacılıkta tercih edilmesini desteklemektedir:
Bu nedenlerle FADEC sistemleri, yalnızca büyük jetlerde değil, daha az karmaşık ve düşük maliyetli hava araçlarında da tercih edilir hale gelmiştir.
Günümüzde piston motorlu uçaklarda FADEC sistemlerinin kullanımı hızla artmaktadır. Özellikle Continental ve Lycoming gibi üreticiler, pistonlu motorlara yönelik FADEC çözümleri sunmaktadır:
1. Continental PowerLink™ FADEC:

PowerLink Continental IOF-240 motoru (Kredi: Aero News Network)
2. Lycoming iE2™ FADEC:
Lycoming iE2 Motoru (Kredi: Lycoming)
Bu uygulamalar sayesinde pilotlar, motorun iç davranışına odaklanmak yerine uçuşa odaklanabilir. Ayrıca motor ömrü, yakıt verimliliği ve bakım döngüleri iyileştirilir.
FADEC’in genel havacılıktaki bir diğer yükselen uygulama alanı, küçük ölçekli turbojet motorlarıdır. Eğitim, araştırma ve sivil İHA sistemlerinde kullanılan bu motorlar düşük itki sınıfındadır (genellikle <1500 N). Bu motorlar için FADEC entegrasyonu şu avantajları sağlar:
Örneğin, TKT-1 isimli eğitim amaçlı küçük turbojet motoru için geliştirilen FADEC mimarisi, PID kontrol algoritmalarıyla düşük maliyetli, sadeleştirilmiş bir kontrol ortamı sunmakta; sistem aynı zamanda veri toplama ve arıza teşhis fonksiyonlarını da içermektedir.
İHA platformları da FADEC teknolojisinden giderek daha fazla faydalanmaktadır. Özellikle uzun menzilli, yüksek irtifalı veya görev kritik İHA sistemlerinde FADEC’in sunduğu avantajlar şunlardır:
İHA’lar için geliştirilen FADEC sistemleri genellikle daha küçük, hafif, düşük güç tüketimli ve kompakt yazılım mimarisine sahip olacak şekilde tasarlanır. Aynı zamanda CAN-Bus gibi hafif veri haberleşme protokolleriyle uyumlu şekilde entegre edilir.
Genel havacılıkta FADEC kullanımının yaygınlaşmasına rağmen bazı sınırlamalar ve teknik zorluklar devam etmektedir:
Bu nedenle FADEC’in GA segmentinde yaygınlaşması, genellikle yüksek değerli eğitim platformları, otonom sistemler ve teknoloji demonstratörleri gibi özel alanlarla sınırlı kalabilmektedir.
Aktit, Kemal. Modern Methods of FADEC Design and Certification Aspects. 2009.
Chen, Xiang, et al. “Development of a Modular FADEC for Small Scale Turbojet Engine.” ICAS 2022 Conference Proceedings, 2022.
Ding, Yiming, and Xianmin Ma. “Application of Enhanced Methods for Safety Assessment of FADEC.” 2017 Chinese Automation Congress (CAC), 2017.
Karabey, Hakan, and Ayhan Göl. “High-Power Radiated Susceptibility Testing of FADEC Systems in Reverberation Chambers.” IEEE Transactions on Electromagnetic Compatibility 63, no. 2 (2021): 385–393.
Mao, Shiqi, et al. “Reliability Analysis Method of an Aircraft Engine FADEC System.” Chinese Journal of Aeronautics33, no. 3 (2020): 859–869.
Martinod, Olivier, et al. “Accuracy Analysis of a Single-Fault Markov Model for FADEC System.” Journal of Aerospace Information Systems 14, no. 5 (2017): 243–253.
Perera, Lionel, and Yifang Fang. “Reliability Analysis of a Single-Engine Aircraft FADEC.” Mathematics 10, no. 11 (2022): 1780.
Xie, Liang, et al. “Advanced Control Algorithms for a FADEC System in Low-Emission Turbofan Engines.” Mathematics 10, no. 7 (2022): 1055.
Zhang, Lixia, et al. “Development and Testing of Enhanced FADEC System Design Strategies.” Proceedings of the Chinese Society of Aeronautics, 2019.
ing, Yiming, and Xianmin Ma. “An Avionics Simulation Software Architecture Design for Aeroengine FADEC Ground Test.” 2015 4th International Conference on Computer Science and Network Technology (ICCSNT), 2015.
Henüz Tartışma Girilmemiştir
"Tam Yetkili Dijital Motor Kontrolü (FADEC)" maddesi için tartışma başlatın
Tarihçe ve Gelişim Süreci
FADEC Sistemlerinin Ortaya Çıkışı
Gelişim Aşamaları ve Yeni Nesil Mimari
Yazılım ve Güvenlik Gereksinimleriyle Paralel Gelişim
Miniaturizasyon ve Hafif Uygulamalara Entegrasyon
Güncel Eğilimler ve Gelecek Perspektifi
Temel Bileşenler ve Çalışma Prensibi
Ana Bileşenler
Elektronik Kontrol Ünitesi (ECU)
Hidromekanik Metreleme Ünitesi (HMU)
Sensörler ve Veri Giriş Birimi
Bağlantı Elemanları ve Elektriksel Arayüzler
Çalışma Prensibi
Geliştirme Yöntemleri ve Yazılım Mimarisi
Sistem Geliştirme Süreci ve Gereksinimler
Yazılım Mimarisi
Kontrol Algoritmaları
Test ve Doğrulama Ortamları
Sertifikasyon ile Uyum
Sertifikasyon Süreci ve Standartlar
Sertifikasyon Otoriteleri ve Düzenleyici Kurumlar
Kritik Standartlar
RTCA DO-178C / EUROCAE ED-12C - Yazılım Sertifikasyonu
RTCA DO-254 / EUROCAE ED-80 - Donanım Sertifikasyonu
ARP4754A - Sistem Mühendisliği ve Sertifikasyon Süreci
ARP4761 - Emniyet Analizi
MIL-STD ve FAA AC Belgeleri
Sertifikasyon Süreci Adımları
Özel Durumlar: Arıza Toleransı ve Redundancy
Modern Kontrol Yöntemleri
Geleneksel Kontrol Yöntemleri ve Sınırlamaları
Optimal Kontrol Yöntemleri
LQR (Linear Quadratic Regulator)
LQG / LTR (Linear Quadratic Gaussian / Loop Transfer Recovery)
Model Tabanlı Kestirimci Kontrol (MPC)
Yapay Zekâ ve Veri Tabanlı Yaklaşımlar
ANFIS (Adaptive Neuro-Fuzzy Inference System)
NARX (Nonlinear Autoregressive with Exogenous Input)
Hammerstein-Wiener Modelleri
Çok Hedefli (Multi-Objective) Optimizasyon
Arıza Toleranslı ve Adaptif Kontrol
Simülasyon ve Yer Test Ortamları
Simülasyon Ortamlarının Önemi ve Kullanım Amaçları
Aviyonik Simülasyon Yazılım Mimarileri
Yer Testi Ortamları ve Bileşenleri
EMI / EMC ve Radyasyon Testleri
Hata Enjeksiyonu ve Arıza Senaryoları
Gerçek Uçuş Testi Öncesi Entegrasyon
Elektromanyetik Uyum ve Dayanıklılık Testleri
Testlerin Amacı ve Önemi
Test Ortamları: Anekoik vs Reverberasyon Odaları
Test Kapsamı ve Uygulanan Standartlar
Test Yapısı ve Donanımı
Test Kriterleri: “No Effect” Tanımı
Elektromanyetik Uyumluluk Tasarım Önlemleri
Arıza Türleri ve Etki Sınıflandırmaları
Arıza Modları ve Etki Analizi (FMEA / FHA)
Markov Temelli Güvenilirlik Modelleme
State-Part Yöntemi ile Güvenilirlik Değerlendirmesi
Arıza Toleransı ve Redundancy Stratejileri
FADEC’in Genel Havacılıkta Kullanımı
Genel Havacılıkta FADEC Kullanımının Yaygınlaşma Nedenleri
Piston Motorlu Uçaklarda FADEC Uygulamaları
Küçük Turbojet Motorlarda ve Eğitim Sistemlerinde Kullanım
İnsansız Hava Araçlarında (İHA) FADEC Kullanımı
Karşılaşılan Zorluklar ve Sınırlamalar
