Mission Planner, ArduPilot açık kaynaklı otopilot projeleri için geliştirilmiş geniş kapsamlı bir yer kontrol istasyonu (GCS) yazılımıdır. Michael Oborne tarafından geliştirilen bu uygulama, insansız araçların (İHA, helikopter, rover, vb.) konfigürasyonu, kontrolü ve görev planlaması için merkezi bir platform sağlar. Sadece Windows işletim sistemi ile uyumlu olan bu uygulama, ücretsiz ve topluluk yapısına sahiptir.
Mission Planner İlk Ekran (ArduPilot)
Mission Planner; araç kontrolcüsü ile bilgisayar arasında haberleşmeyi sağlayarak gerekli sistem parametrelerinin ayarlanmasını ve aracın gerçek zamanlı olarak izlenmesini mümkün kılar. Harita tabanlı arayüzü sayesinde kullanıcılar görev noktaları (waypoint) tanımlayabilir ve otonom görevler oluşturabilir. İçerisinde yer alan parametreler sayesinde aracın otonom şekilde hareket etmesine yardımcı olur. Ayrıca görev günlüklerindeki verileri kaydederek onları analiz etmeye ve gelişmiş hata ayıklama araçlarını kullanmaya olanak tanır. Yazılım olarak MAVlink haberleşme protokolünü kullanmaktadır. Bu sayede kullanıcıya sensör verilerini, konum bilgilerini ve durum/hata mesajlarını anlık olarak iletebilmektedir.
Mission Planner'ın ana işlevlerinden biri görev planlamacı olarak kullanılmasıdır. Bu işleviyle :
Oluşturulan görevler doğrudan otopilot kontrolcüsüne yüklenebilir ve gerektiğinde düzenlenebilmektedir.
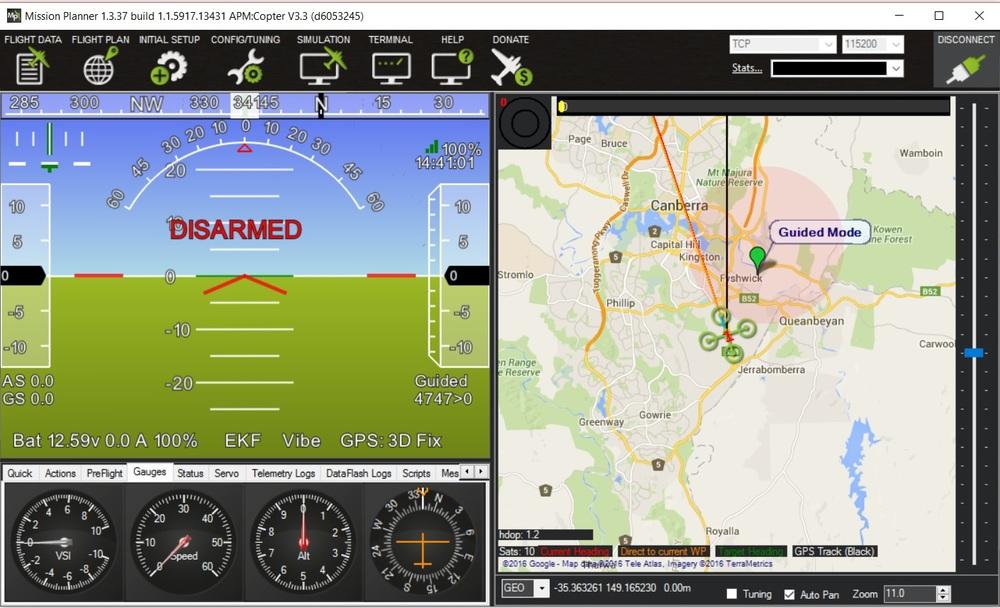
Yazılım, araçtan gelen telemetri verilerini grafikler ve göstergeler aracılığı ile kullanıcıya sunmaktadır. Görev esnasında aracın konum, hız, irtifa bilgileri, batarya durumu, sistem uyarıları, sensör performansları vb. HUD (Baş Üstü Ekranı) ekranından izlenerek değerlendirilebilir. Ayrıca telemetriden gelen verilerin anlık kaydedilmesi sayesinde görev bittiğinde dahi daha detaylı grafiklere bakılarak log analizi yapılabilmektedir.

HUD -Baş Üstü Ekranı- Ekranı (ArduPilot)

Detaylı HUD -Baş Üstü Ekranı- Ekranı (ArduPilot)
Mission Planner, araç kontrolcüsüne ait olan parametrelerin düzenlenip daha stabil şekilde çalıştırılmasına olanak tanır. PID ayarları, sensör kalibrasyonları ve uçuş modları gibi temel ayarlardan daha karmaşık ayarlara kadar bu yazılım üzerinden yapılandırılabilir. Ek olarak kullanıcıyı hatalı ve eksik ayarlar konusunda bilgilendirerek sistemin daha kararlı çalışmasına olanak tanır.
ArduPilot Development Team. “Flight Data Screen Overview — Mission Planner Ground Control Station.” ArduPilot Documentation. Accessed January 24, 2026. https://ardupilot.org/planner/docs/mission-planner-ground-control-station.html.

Henüz Tartışma Girilmemiştir
"Mission Planner " maddesi için tartışma başlatın
Genel Özellikler
Görev Planlama
Görev İzleme ve Telemetri
Parametre Ve Sistem Ayarlarını Tanımlama
